Phiên bản VK1.6 là mạch điều khiển được thiết kế với mục
đích xây dựng 1 ứng dụng tổng hợp của tất cả các mạch multirotor trên thế giới
đối với dòng vi điều khiển Atmega328 như Promini của Arduino, AEROquad, PIPOISU,
ALL IN ONE, MONGOOSE, SIRIUS, QUADRINO, CRIUS… nên có thể cài đặt được tất cả
các phần mềm mã nguồn mở của các hãng này cho VK1.6 đối với các loại multirotor,
đặc biệt bộ 3 cảm biến tương đương với phiên bản mới nhất FreeIMU v0.43 của
http://www.varesano.net/ nên chất lượng
được đánh giá siêu ổn định.
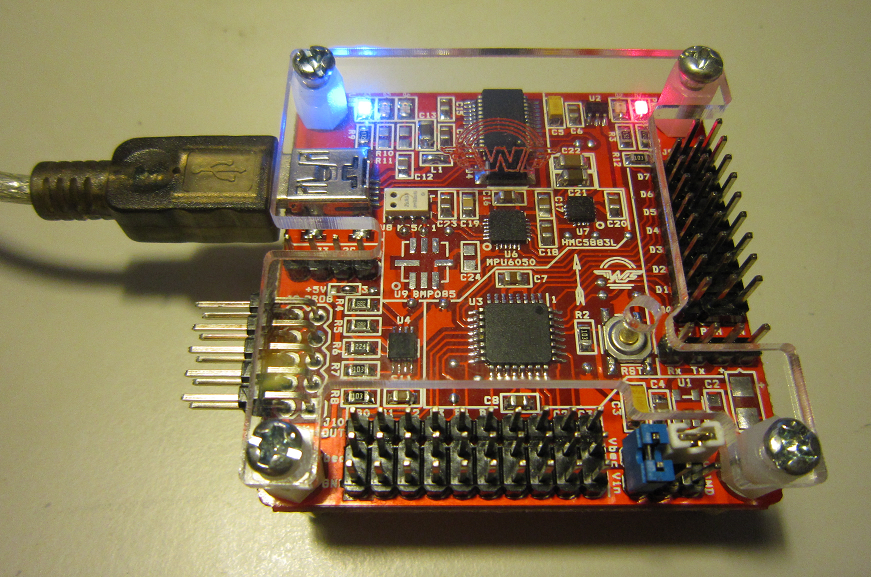
VK1.6 được thiết kế gồm các cảm biến chuyển động mới nhất
của các hãng Invensene, Honeywell, BOSCH, đặc biệt là cảm biến khí áp MS5611
của Meas-spec nên cho bạn 1 cảm giác bay tự động độ cao khá thú vị.
Ngoài ra, VK1.6 còn là một kitboard hỗ trợ người sử dụng có
nhu cầu học tập, phát triển các ứng dụng cho riêng mình.
Với mục đích hỗ trợ thuận tiện nhất cho người dùng nên ngoài
các cấu hình thông thường như các hãng khác, VK1.6 còn hỗ trợ giao tiếp FTDI
USB onboard, do vậy bạn không cần phải mua thêm adapter này.
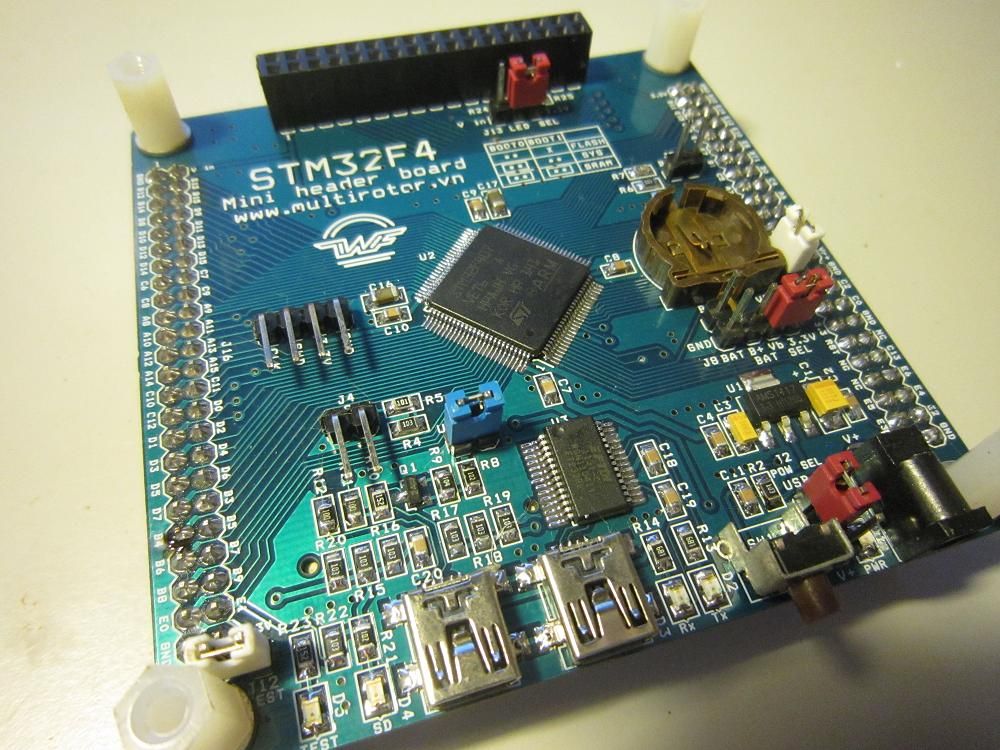
Cấu hình VK phiên bản 1.6
-
Vi điều khiển Atmega328P / 16MHz / 5V-12V
-
Accelerometer/Gyrometer MPU6050
-
Magnatometer HMC5883L
-
Barometer BMP085 hoặc MS5611 (tùy chọn)
-
FTDI USB onboard 11520 kbps
-
18 chân vào ra
-
Cổng mở rộng giao tiếp I2C, USART (3.3V / 5V) cho các
modul ngoại vi.
-
Cổng nạp chuẩn AVR ISP 10 chân
-
Hỗ trợ 6 hoặc 8 tín hiệu PWM RX hoặc cổng vào PWM SUM
RX (với mạch PWM SUM theo tùy chọn)
-
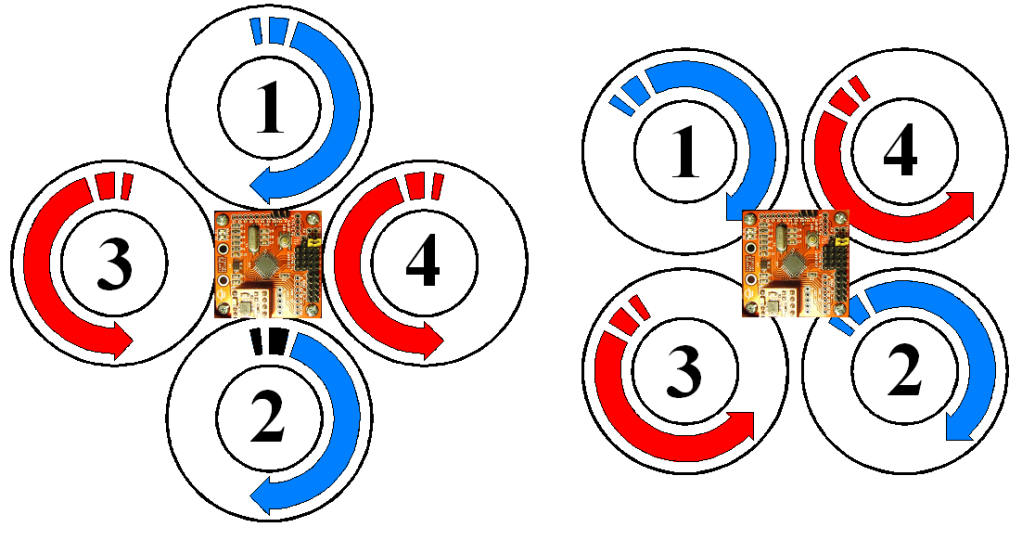
Hỗ trợ các kết cấu BI, TRI, QUADP, QUADX, Y4, Y6, HEX6,
HEX6X, OCTOX8, OCTOFLATP, OCTOFLATX, FLYING_WING, VTAIL4
-
Hỗ trợ GIMBAL pitch-roll và CAMERA Triger
-
Tần số ESC 490 Hz
-
Dễ dàng nâng cấp vì VK1.6 tương thích với cảm biến 9
trục MPU9150 của hãng Invensense sắp ra mắt trong thời gian tới
-
Sử dụng nguồn ESC BEC (khi chơi) hoặc nguồn USB (khi
chạy setup) nên không cần cấp nguồn ngoài cho mạch trong bất kỳ điều kiện hoạt
động nào
-
Kích thước nhỏ gọn (50x50mm), khoảng cách tâm lỗ
45x45mm tương đương KK board nên không cần sửa lại khung của multirotor.
VK1.6 có thể sử dụng các phần mềm nổi tiếng thế giới
MultiWii 2.0 hoặc AEROquad hoặc phần mềm QuadrotorVN v1.6.
Với cấu hình trên, bạn chỉ cần duy nhất 1 board VK1.6 để
thỏa mãn mọi nhu cầu học tập và giải trí của mình trong thời gian lâu dài mà
không phải bận tâm đến sự lỗi thời của sản phẩm.
Hãy thử một trải nghiệm mới.

















{kind=link}
{kind=link}