
Quadrotor version 1.3.1
- MPU3050 + BMA180 + HMC5883L
- QUAD +
- QUAD X
http://www.mediafire.com/download.php?uq6dcr1lj5wgshb
Quardrotor board V1.3.1 đã được nạp sẵn chương trình cấu hình QUADX (ready to fly). Nếu bạn không quan tâm đến phần setup, bạn có thể lắp ráp và chơi luôn.
2 cách lắp ráp:
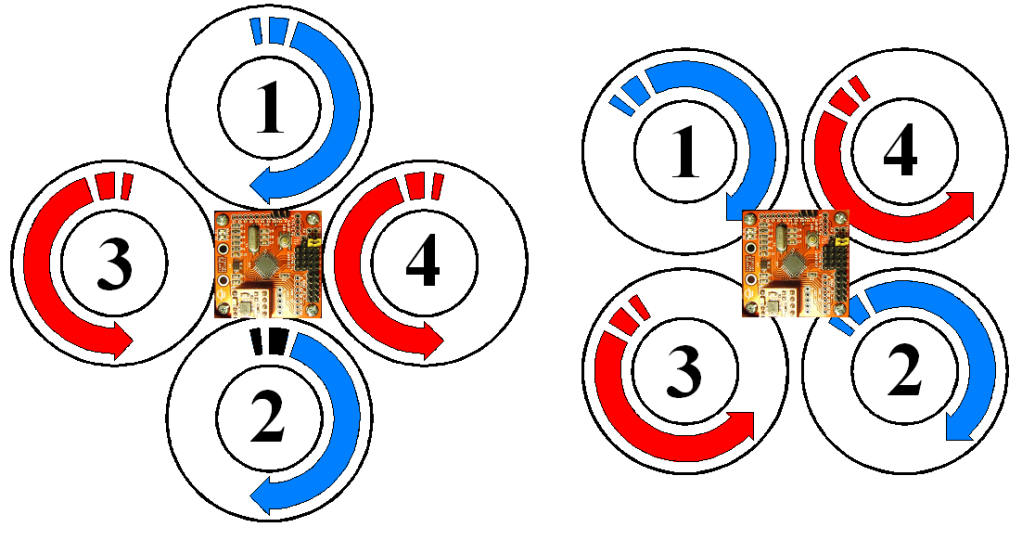
Vị trí các chân tương ứng của mạch điều khiển và rotor mời các bạn xem thêm trong Hướng dẫn cấu hình.
